一个具体的智能体通常有 5 种实现方式,即基于逻辑演绎、基于反应、基于决策理论、基于信念-期望-意图逻辑( Belief-Desire-Intention,BDI)、分层混合结构。
其中,基于反应式的包孕结构和基于 BDI逻辑的智能体结构是最著名的结构下面。
智能体的包孕结构(subsumption),也被称为反应式结构。在这种结构设计中,科学家认为智能体的理性行为并不是由基于逻辑推理或者基于决策理论方法进行直接编码,而是在智能体与环境交互过程中涌现的。
BDI结构即信念-期望-意图逻辑( Belief-Desire-Intention,BDI),该结构认为人的推理是一种实证推理,其特点是人的知识是不断增长、变化的。同时人的目标会随着自己的知识增长、环境状态的变化而发生改变。
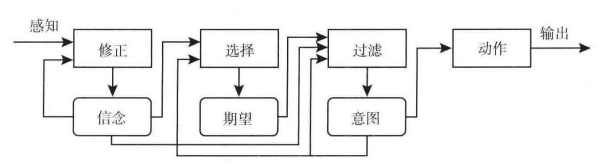
BDI-agent拥有belief、desire和intention三种智能属性。其中belief表示的是BDI-agent所相信的事件,例如在某个位置、目前的速度或当前的外部环境情况等等,然而belief并不一定是事实,仅仅代表BDI-agent的认知,BDI-agent会根据自身对环境的感知或自身做出的行为改变环境进而改变belief,或是将belief作为参考做出一系列的判断或行为。desire指的是BDI-agent想要实现的环境环境状态。desire和intention的不同点在于desire可以是没有具体实现方案去实现的,甚至不可实现的,或者说仅仅代表一些未实例化的想法,而并没有确定去如何做,做什么;而intention是BDI-agent认为可以实现的,是实例化的desire,并有具体的可行方案或计划plan去实现。而实现plan可能需要通过实现多个sub-goal或者action来完成。intention也可表示成为了实现goal而使用的实例化的一系列计划plan。其中,plan的plan body计划体中就包含了完成goal的具体行动以及子目标sub-goal,当BDI-agent承诺要实现某个goal时,BDI-agent需要执行一个具体的计划plan来完成goal。一个goal可能可由多个不同的plan来实现,BDI-agent只要选择其中一个plan执行即可,即BDI-agent会从该goal对应的可选plan中根据具体实际情况,判断并选择一个plan,通过执行选中的plan来完成相应goal,这种多个plan的构造也使得智能体可以灵活应对不同的环境。由于plan-body也可能包含sub-goal,在BDI-agent运行过程中,会选出并执行多个plan,这些plan都是智能体从可选plan库,计划库中选出来的并承诺要去尝试的,也就是一系列部分实例化的plan即是intention,从具体实现的角度来说,每个intention都是一个栈,里面存储的就是部分实例化的plan,intention的执行也就是执行栈中一系列的plan。